Introduction
Tasks in ML are typically defined as finding a minimizer of an objective function 


The paper approaches the optimization from a novel perspective: using learned update rules for our network, capable of generalizing to a specific class of problems. The update to the current set of parameters is predicted by a neural-network, specifically RNN-based network ( 
Framework
Given an Optimizee: 


The objective function for the optimizer is

where
and 
The update steps $ latex g_{t}$ and next hidden state 


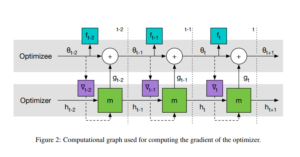
Coordinatewise LSTM architecture
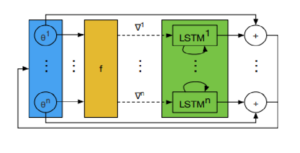
Applying per-parameter different LSTM would have been computationally very expensive and would have introduced more than tens/thousands of parameters to optimize on.
To avoid this issue, this paper utilizes a coordinatewise network architecture (LSTM-based architecture) where the optimizer parameters are shared over different parameters of the optimizee and separate hidden state is maintained for each optimizee parameter. The base LSTM architecture is a two-layer LSTM using standard forget-gate architecture.
Preprocessing
One key difficulty when passing the gradients of parameters to the optimizer network is how to handle the different scales of the gradients. Typical deep networks work well when the input to the network is not arbitrarily-scaled.
Instead of passing the gradient 

Experiment
The authors used 2 layer LSTMs with 20 hidden units in each layer for optimizer. Each optimizer is trained by minimizing the loss equation using truncated BPTT. Adam with the learning rate chosen by random line search is used for minimization. The authors compare the trained optimizers with standard optimizers like SGD, RMSProp, ADAM and NAG. The learning rate for these optimizers are tuned while the other parameters are set to default values in Torch7.
The authors evaluated a class of 10 dimensional synthetic quadratic functions whose minimizing function is in form:
![]()
where W is a 10X10 matrix and y is 10 dimensional vector drawn from IID Guassian distribution. As shown in the fig below LSTM based optimizer performs much better than the standard optimizers.

The author has trained optimizer over a neural network with 1 hidden layer of 20 hidden units using sigmoid activation on MNIST training set. They have experimentally shown that the optimizer generalizes much better than standard optimizers for different architectures with more layers (2) and hidden units (40) as shown below.
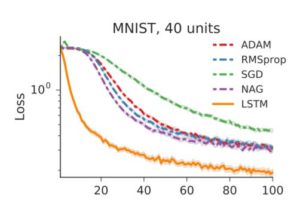

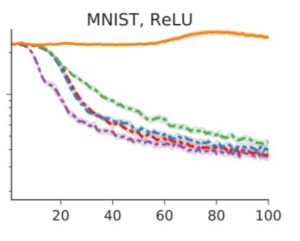
However, when the architecture is changed drastically like using relu activation instead of Sigmoid, the LSTM optimizer does not scale well as shown below.
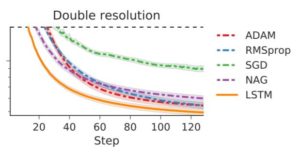
The author has used LSTM optimizer for neural art to generate multiple image styles using 1 style image and 1800 content images. They found that LSTM optimizer outperform standard optimizers for test content images at training resolution as well as twice the training resolution as shown below.

Conclusion
The authors have shown how to cast the design of optimization algorithms as learning problems. Their experiments have shown that learnt neural optimizers perform better than state of art optimizers for deep learning.
References
[1] Learning to Learn by gradient descent by gradient descent( https://arxiv.org/abs/1606.04474)